Zwei-Freiheitsgrade-Struktur zur robusten Radschlupfregelung f�r Antiblockiersysteme - Softcover
Zu dieser ISBN ist aktuell kein Angebot verf�gbar.
Alle Exemplare der Ausgabe mit dieser ISBN anzeigen:
- ISBN 10 3754113437
- ISBN 13 9783754113431
- EinbandBroch�
Neu kaufen
Mehr zu diesem Angebot erfahren
EUR 35,00
Versand:
EUR 23,00
Von Deutschland nach USA
Beste Suchergebnisse bei AbeBooks
Foto des Verk�ufers
Zwei-Freiheitsgrade-Struktur zur robusten Radschlupfregelung f�r Antiblockiersysteme
Print-on-Demand
Anbieter:
Bewertung
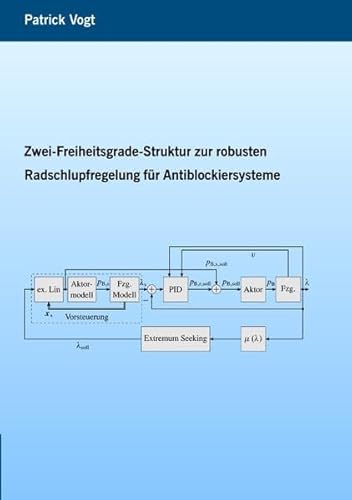
Buchbeschreibung Taschenbuch. Zustand: Neu. This item is printed on demand - it takes 3-4 days longer - Neuware -In dieser Arbeit wird ein modellbasierter Ansatz zur Regelung des Radschlupfes vorgeschlagen, der aus einer Zwei-Freiheitsgrade-Struktur mit nichtlinearer modellbasierter Vorsteuerung und einer robust entworfenen R�ckf�hrung mittels Gain-Scheduling besteht. F�r die Vorsteuerung wird ein Ansatz �ber die exakte Eingangs-/Ausgangslinearisierung gew�hlt, mit dem sich das nichtlineare System bezogen auf das Ein-/Ausgangsverhalten wie ein lineares System regeln l�sst. F�r die R�ckf�hrung wird ein Gain-Scheduling �ber die Schedulingparameter Fahrzeuggeschwindigkeit und Radschlupf durchgef�hrt, um die durch die hohe Parameterunsicherheit in der Reifenkennline und die reziproke Abh�ngigkeit der Systemdynamik von der Geschwindigkeit den variablen Parameterbereich in kleinere Unsicherheitsbereiche zu unterteilen, f�r die anschlie�end ein linearer Regler mit fester Struktur �ber die Methode der robusten Polbereichsvorgabe entworfen wird. Basierend auf diesem Schlupfregler wird in einem zweiten Schritt ein Algorithmus verwendet, der in der Lage ist, das Maximum der Reibwertkennlinie einzuregeln, um den verf�gbaren Kraftschluss bestm�glich auszunutzen, das sog. Extremum Seeking. Der gesamte Reglerentwurf erfolgt dabei rein zeitdiskret, um die charakteristischen Effekte der Diskretisierung bei einer digitalen Regelung behandeln zu k�nnen. 172 pp. Deutsch. Bestandsnummer des Verk�ufers 9783754113431
Weitere Informationen zu diesem Verk�ufer | Verk�ufer kontaktieren
Neu kaufen
EUR 35,00
W�hrung umrechnen
Foto des Verk�ufers
Zwei-Freiheitsgrade-Struktur zur robusten Radschlupfregelung f�r Antiblockiersysteme
Verlag:
Epubli Apr 2021
(2021)
ISBN 10: 3754113437
ISBN 13: 9783754113431
Neu
Taschenbuch
Anzahl: 20
Anbieter:
Bewertung
Buchbeschreibung Taschenbuch. Zustand: Neu. This item is printed on demand - it takes 3-4 days longer - Neuware -In dieser Arbeit wird ein modellbasierter Ansatz zur Regelung des Radschlupfes vorgeschlagen, der aus einer Zwei-Freiheitsgrade-Struktur mit nichtlinearer modellbasierter Vorsteuerung und einer robust entworfenen R�ckf�hrung mittels Gain-Scheduling besteht. F�r die Vorsteuerung wird ein Ansatz �ber die exakte Eingangs-/Ausgangslinearisierung gew�hlt, mit dem sich das nichtlineare System bezogen auf das Ein-/Ausgangsverhalten wie ein lineares System regeln l�sst. F�r die R�ckf�hrung wird ein Gain-Scheduling �ber die Schedulingparameter Fahrzeuggeschwindigkeit und Radschlupf durchgef�hrt, um die durch die hohe Parameterunsicherheit in der Reifenkennline und die reziproke Abh�ngigkeit der Systemdynamik von der Geschwindigkeit den variablen Parameterbereich in kleinere Unsicherheitsbereiche zu unterteilen, f�r die anschlie�end ein linearer Regler mit fester Struktur �ber die Methode der robusten Polbereichsvorgabe entworfen wird. Basierend auf diesem Schlupfregler wird in einem zweiten Schritt ein Algorithmus verwendet, der in der Lage ist, das Maximum der Reibwertkennlinie einzuregeln, um den verf�gbaren Kraftschluss bestm�glich auszunutzen, das sog. Extremum Seeking. Der gesamte Reglerentwurf erfolgt dabei rein zeitdiskret, um die charakteristischen Effekte der Diskretisierung bei einer digitalen Regelung behandeln zu k�nnen. 172 pp. Deutsch. Bestandsnummer des Verk�ufers 9783754113431
Weitere Informationen zu diesem Verk�ufer | Verk�ufer kontaktieren
Neu kaufen
EUR 35,00
W�hrung umrechnen
Foto des Verk�ufers
Zwei-Freiheitsgrade-Struktur zur robusten Radschlupfregelung f�r Antiblockiersysteme
Anbieter:
Bewertung
Buchbeschreibung Taschenbuch. Zustand: Neu. Druck auf Anfrage Neuware - Printed after ordering - In dieser Arbeit wird ein modellbasierter Ansatz zur Regelung des Radschlupfes vorgeschlagen, der aus einer Zwei-Freiheitsgrade-Struktur mit nichtlinearer modellbasierter Vorsteuerung und einer robust entworfenen R�ckf�hrung mittels Gain-Scheduling besteht. F�r die Vorsteuerung wird ein Ansatz �ber die exakte Eingangs-/Ausgangslinearisierung gew�hlt, mit dem sich das nichtlineare System bezogen auf das Ein-/Ausgangsverhalten wie ein lineares System regeln l�sst. F�r die R�ckf�hrung wird ein Gain-Scheduling �ber die Schedulingparameter Fahrzeuggeschwindigkeit und Radschlupf durchgef�hrt, um die durch die hohe Parameterunsicherheit in der Reifenkennline und die reziproke Abh�ngigkeit der Systemdynamik von der Geschwindigkeit den variablen Parameterbereich in kleinere Unsicherheitsbereiche zu unterteilen, f�r die anschlie�end ein linearer Regler mit fester Struktur �ber die Methode der robusten Polbereichsvorgabe entworfen wird. Basierend auf diesem Schlupfregler wird in einem zweiten Schritt ein Algorithmus verwendet, der in der Lage ist, das Maximum der Reibwertkennlinie einzuregeln, um den verf�gbaren Kraftschluss bestm�glich auszunutzen, das sog. Extremum Seeking. Der gesamte Reglerentwurf erfolgt dabei rein zeitdiskret, um die charakteristischen Effekte der Diskretisierung bei einer digitalen Regelung behandeln zu k�nnen. Bestandsnummer des Verk�ufers 9783754113431
Weitere Informationen zu diesem Verk�ufer | Verk�ufer kontaktieren
Neu kaufen
EUR 35,00
W�hrung umrechnen
Foto des Verk�ufers
Zwei-Freiheitsgrade-Struktur zur robusten Radschlupfregelung f�r Antiblockiersysteme
Print-on-Demand
Anbieter:
Bewertung
Buchbeschreibung Zustand: New. Dieser Artikel ist ein Print on Demand Artikel und wird nach Ihrer Bestellung fuer Sie gedruckt. Es wird ein modellbasierter Ansatz zur Regelung des Radschlupfes vorgeschlagen, der aus einer Zwei-Freiheitsgrade-Struktur mit Vorsteuerung und einer robust entworfenen Rueckfuehrung besteht.In dieser Arbeit wird ein modellbasierter Ansatz zur Regelung de. Bestandsnummer des Verk�ufers 468212515
Weitere Informationen zu diesem Verk�ufer | Verk�ufer kontaktieren
Neu kaufen
EUR 35,00
W�hrung umrechnen